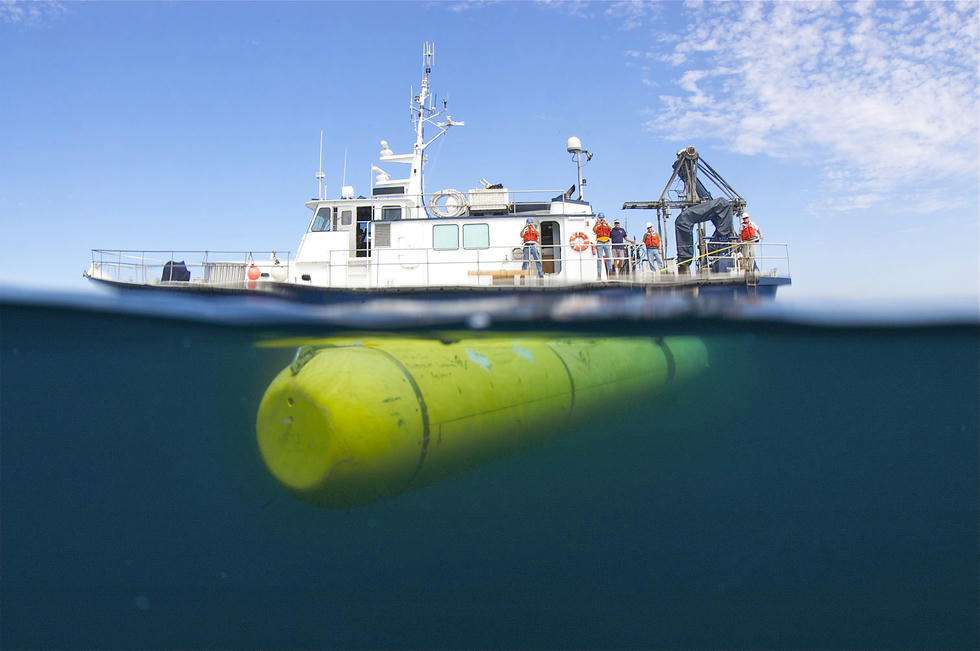
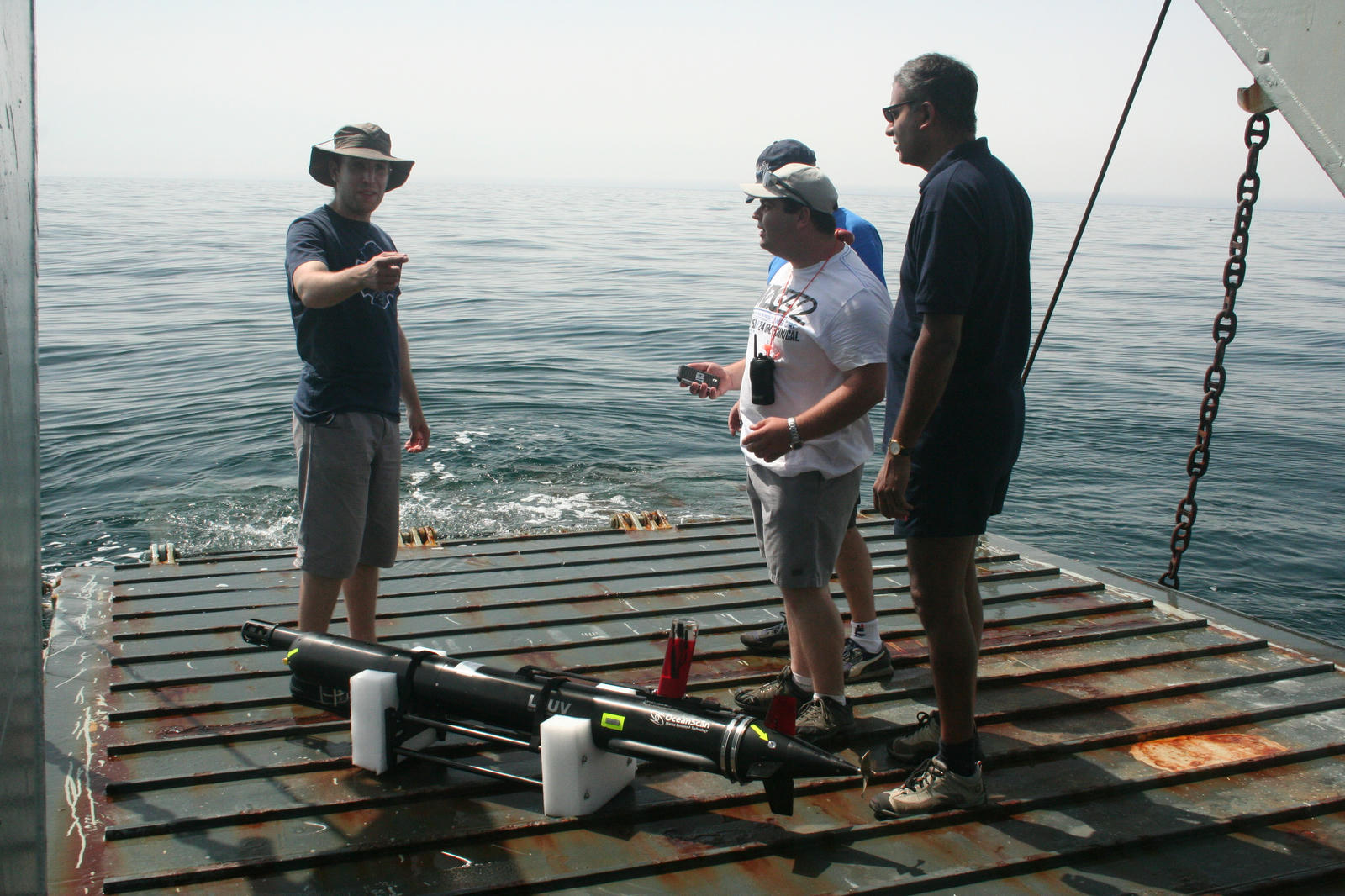
At MBARI, Kanna’s role (2005 to 2013) as the Principal Researcher for Autonomy and a PI, to conduct research in brining advanced methods in AI for marine exploration. Towards this end, he and his group worked on designing, testing and operating an embedded autonomous controller for adaptive sampling for AUVs (autonomous underwater vehicles), which can sense, plan and act performing cognitive functions similar to how humans perform tasks. The Teleo-Reactive EXecutive (T-REX) is the only operational plan synthesis, repair and execution system for oceanographic observations. It has been used onboard AUVs in California, Norway and Portugal. A version of T-REX was also used for ship-based operations of AUVs and UAVs (unmanned aerial vehicles) in the REP-15 exercises off of the Azores in the mid-Atlantic. T-REX is an open-source planning and execution framework, which means within it, various forms of logical reasoning methods including those in Machine Learning can be incorporated.
The research efforts at MBARI also leaned towards providing an information driven platform for maritime situational awareness. The ODSS (Oceanographic Decision Support System) coupled the lessons learned from the MAPGEN system for use on Mars with MAPGEN with the unique features of data collection, localization and near real-time data streams from mobile and immobile robots in the ocean.
Publications
Autonomous Control
Ferreira, António Sérgio and Costa, Maria and Py, Frédéric and Pinto, José and Silva, Mónica A. and Nimmo-Smith, Alex and Johansen, Tor Arne and Sousa, João Borges and Rajan, Kanna,
Advancing Multi-Vehicle Deployments in Oceanographic Field Experiments,
R.N. Smith and F. Py and P. Cooksey and G. Sukhatme and K. Rajan,
Adaptive Path Planning for Tracking Ocean Fronts with an Autonomous Underwater Vehicle,
Z. Saigol and F. Py and K. Rajan and C. McGann and J. Wyatt
and R. Dearden,
Randomized Testing for Robotic Plan Execution for Autonomous
Systems,
C. McGann and F. Py and K. Rajan and A. Olaya,
Integrated Planning and Execution for Robotic Exploration,
F. Py and K. Rajan and C. McGann,
A Systematic Agent Framework for Situated Autonomous
Systems,
C. McGann and F. Py and K. Rajan and J. P. Ryan and
H. Thomas and R. Henthorn and R. McEwen,
Preliminary Results for Model-Based Adaptive Control of an Autonomous Underwater Vehicle,
C. McGann and F. Py and K. Rajan,
On Efficient Deliberation and Execution,
C. McGann and F. Py and K. Rajan and J. P. Ryan and R. Henthorn,
Adaptive Control for Autonomous Underwater Vehicles,
C. McGann and F. Py and K. Rajan and H. Thomas and
R. Henthorn and R. McEwen,
A Deliberative Architecture for AUV Control,
C. McGann and F. Py and K. Rajan and H. Thomas and
R. Henthorn and R. McEwen,
T-REX: A Deliberative System for AUV Control,
Decision Support
Thom Maughan and Jnaneshwar Das and Mike McCann and Mike
Godin and Fred Bahr and Kevin Gomes and Tom O’Reilly
and Frederic Py and Monique Messie and John Ryan and
Francisco Chavez and Jim Bellingham and Maria Fox
and Kanna Rajan,
An Oceanographic Decision Support System for Scientific Field Experiments,
T.G. Maughan and K. Rajan and J. G. Bellingham and
M. McCann and D. Cline and K. Gomes and T. O'Reilly
and D. Edgington and J. Das and F. Chavez,
Oceanographic Decision Support System, A Tool to Improve Efficiency Of Biological Ocean Study,
M.A. Godin, J. G. Bellingham, K. Rajan, Y. Chao, and
N. Leonard,
A Collaborative Portal for Ocean Observatory Control,
Machine Learning
M. Bernstein and R. Graham and D. Cline and J. M. Dolan and K. Rajan,
Learning-based event response for marine robotics,
J. Das and K. Rajan and S. Frolovy and F. Pyy and J. Ryany and D. A. Caronz and G. S. Sukhatme,
Towards marine bloom trajectory prediction for AUV mission planning,
Adaptive Sampling
T. O. Fossum and C. Travelletti and J. Eidsvik and D. Ginsbourger and K. Rajan,
Informative Oceanographic Sampling using Excursion
Probabilities for Multivariate Random Fields,
Glaucia M. Fragoso and Emlyn J. Davies and Ingrid Ellingsen and Matilde S. Chauton and Trygve Fossum and Martin Ludvigsen and Kristine B. Steinhovden and Kanna Rajan and Geir Johnsen,
Physical controls on phytoplankton size structure, photophysiology and suspended particles in a Norwegian biological hotspot,
Gunhild Elisabeth Berget and Trygve Olav Fossum and Tor Arne Johansen and Jo Eidsvik and Kanna Rajan,
Adaptive Sampling of Ocean Processes Using an AUV with a Gaussian Proxy Model,
Fossum, Trygve O. and Fragoso, Glaucia M. and Davies, Emlyn J. and Ullgren, Jenny E. and Mendes, Renato and Johnsen, Geir and Ellingsen, Ingrid and Eidsvik, Jo and Ludvigsen, Martin and Rajan, Kanna,
Toward adaptive robotic sampling of phytoplankton in the coastal ocean,
Fossum, Trygve Olav and Eidsvik, Jo and Ellingsen, Ingrid and Alver, Morten Omholt and Fragoso, Glaucia Moreira and Johnsen, Geir and Mendes, Renato and Ludvigsen, Martin and Rajan, Kanna,
Information-driven robotic sampling in the coastal ocean,
J. Gottlieb and R. Graham and T. Maughan and F. Py and
G. Elkaim and K. Rajan,
An Experimental Momentum-based Front Detection for
Autonomous Underwater Vehicles,
Jnaneshwar Das and Frédéric Py and Julio B.J. Harvey and John P. Ryan and Alyssa Gellene and Rishi Graham and David A. Caron and Kanna Rajan and Gaurav S. Sukhatme,
Data-driven robotic sampling for marine ecosystem monitoring,
J. Das and J. Harvey and F. Py and H. Vathsangam and R. Graham and K. Rajan and G. S. Sukhatme,
Hierarchical probabilistic regression for AUV-based adaptive sampling of marine phenomena,
J. Das and J. Harvey and F. Py and H. Vathsangam and
R. Graham and K. Rajan and G. S. Sukhatme,
Multi-stage Bayesian Regression for Adaptive Sampling of Marine Phenomena,
R. Graham and F. Py and J. Das and D. Lucas and T. Maughan
and K. Rajan,
Exploring Space-Time Tradeoffs in Autonomous Sampling for
Marine Robotics,
A. Garcia-Olaya and F. Py and J. Das and K. Rajan,
An Online Utility-Based Approach for Sampling Dynamic Ocean Fields,
J. Das and F. Py and T. Maughan and M. Messie and
T. O'Reilly and J. Ryan and G. S. Sukhatme and
K. Rajan,
Coordinated Sampling of Dynamic Oceanographic Features with AUVs and Drifters,
J. Das and F. Py and T. Maughan and M. Messie and
T. O'Reilly and J. Ryan and G. S. Sukhatme and
K. Rajan,
Coordinated Sampling of Dynamic Oceanographic Features with AUVs and Drifters,
J. Das and T. Maughan and M. McCann and M. Godin and T. O'Reilly and M. Messié and F. Bahr and K. Gomes and F. Py and J. G. Bellingham and G. S. Sukhatme and K. Rajan,
Towards mixed-initiative, multi-robot field experiments: Design, deployment, and lessons learned,
Das, Jnaneshwar
and Py, Frédéric
and Maughan, Thom
and O'Reilly, Tom
and Messié, Monique
and Ryan, John
and Rajan, Kanna
and Sukhatme, Gaurav S.,
Simultaneous Tracking and Sampling of Dynamic Oceanographic Features with Autonomous Underwater Vehicles and Lagrangian Drifters,
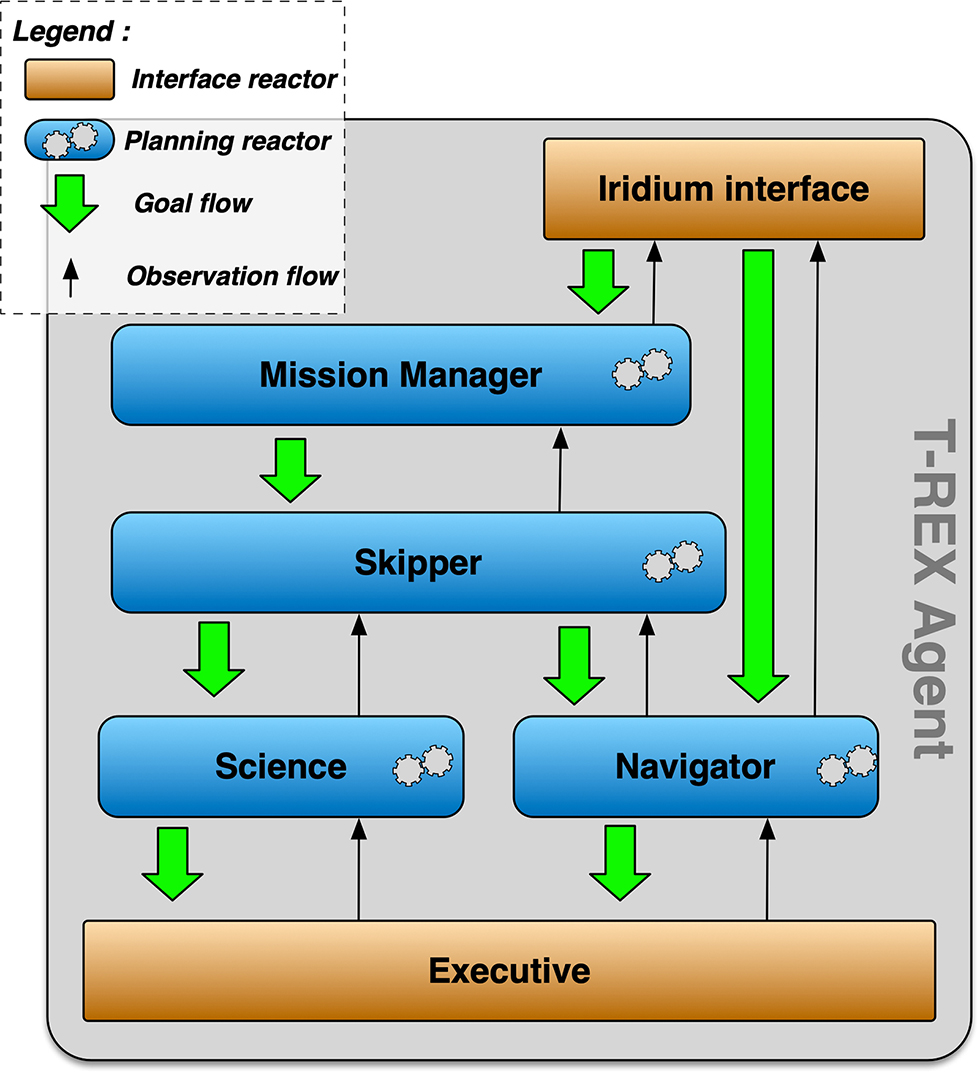
T-REX is the only operational planning and execution framework in maritime robotics, that uses the Sense-Plan-Act cognitive cycle to reason about the environment and to provide an appropriate response for the vehicle. This embedded software system, obtains sensor data to opportunistically and deterministically deal with the conundrum of reaction with deliberative plan projection, by balancing the ‘hear and now’ opportunism with goals and expectations that the autonomous robot needs to fulfill. By using a ‘divide and conquer’ strategy to break down a complex control problem into multiple reactors (planning engines), the agent can ensure encapsulated expertise in each reactor provides the best strategy to solving a focused problem, while ensuring timeliness and near real-time performance.
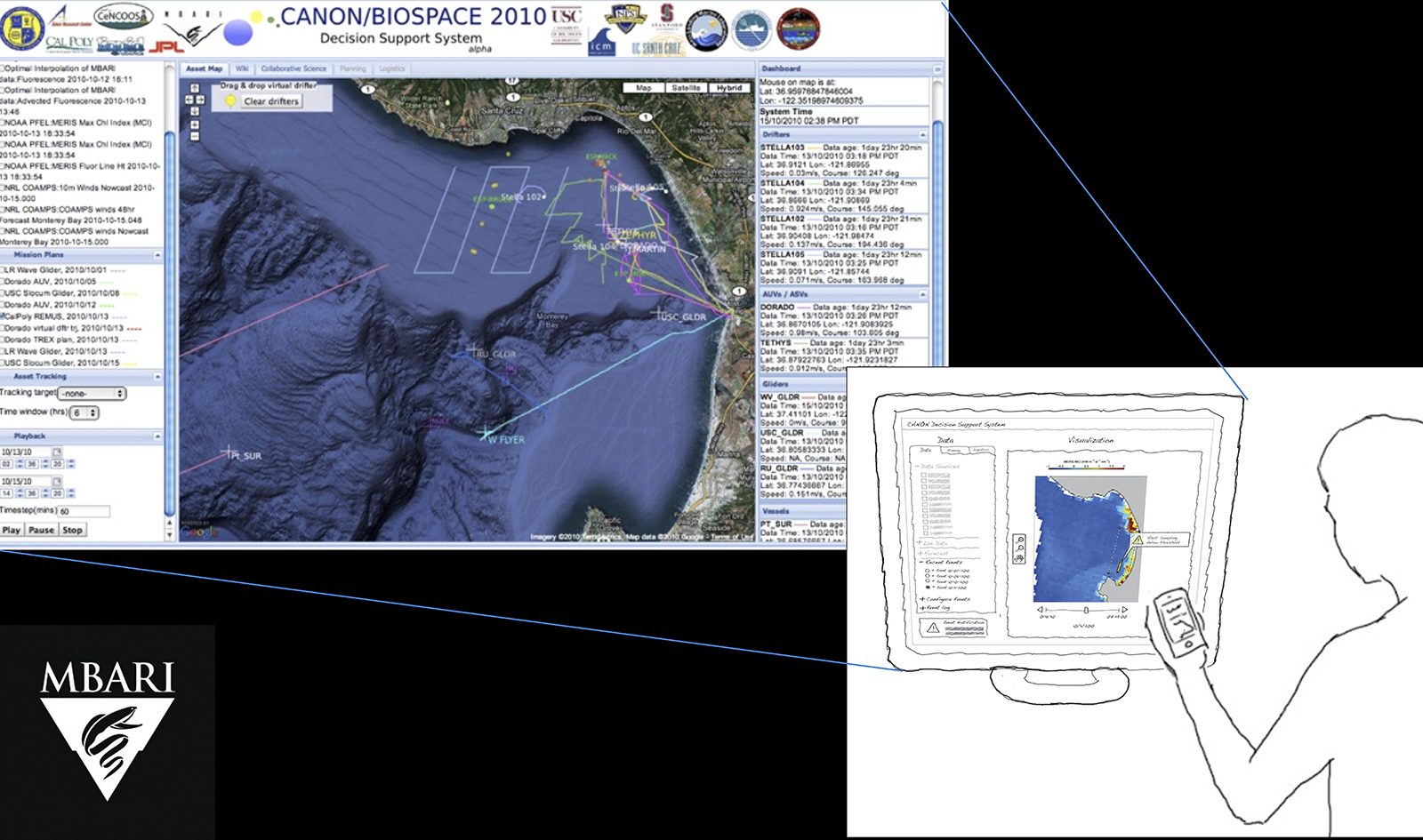
Oceanographic Decision Support System (ODSS)
The Oceanographic Decision Support System, is a platform for shore/ship situational awareness and human-in-the-loop decision making to direct and assimilate data from robotic assets at sea. Data is obtained via satellite, Wifi or GSM to shore and a multi-layered system can visualize mobile and immobile robotic assets and target and modify their operation with commands in response to dynamic events. The ODSS is inspired by work done on the Mars Exploration Rovers mission.

AILARON brings together the principles of sensing, pattern-recognition, modeling and decision-making inside an AI-driven autonomous underwater vehicle. The in-situ adaptive algorithms can target specific planktonic biomass, and find-tag-follow them in space and time within the upper water-column, much like a ’sniffer dog’ out at sea. The project will ultimately deliver a capability to pinpoint specific taxa by surveying at the sub mesoscale and return to hotspots of scientific interest and map them in high-definition.
{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}
{kind=link}

{kind=link}

{kind=link}
