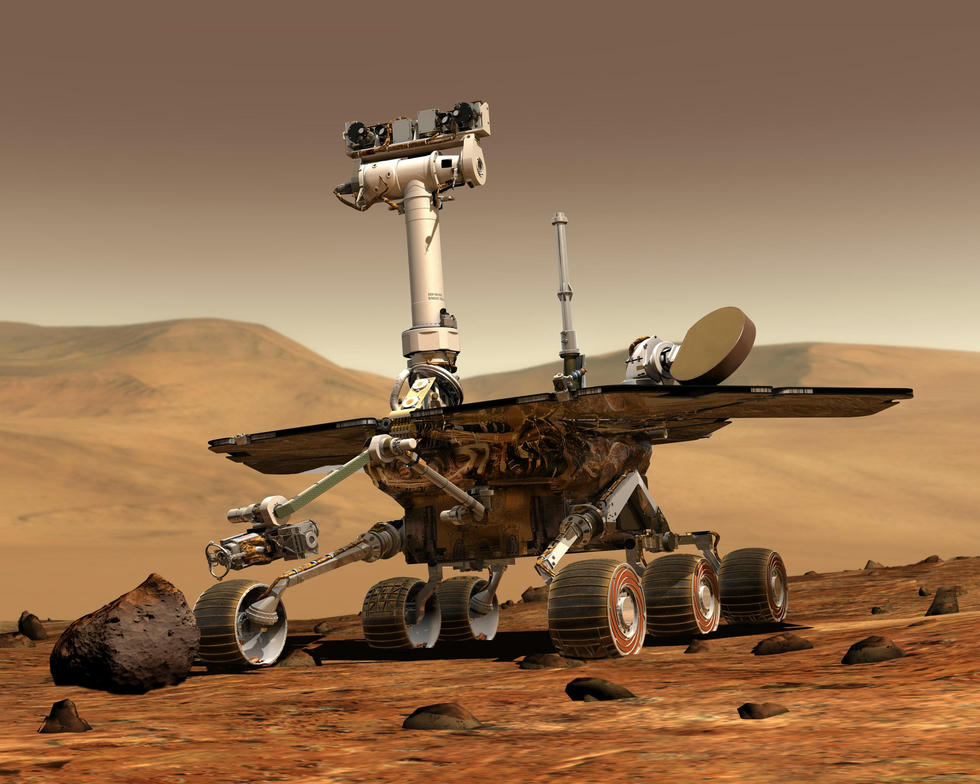
NASA Mars Exploration Rovers
First AI system to control a vehicle on another planet (2004)
For the 2003 Mars Exploration Rovers (MER) mission was used to command and control the two rovers Spirit and Opportunity on the surface of the Red Planet. Kanna was the Principal Investigator (PI) of the project till 2005. The goal of the system was to plan and validate the schedule of activities to be sequenced and executed onboard the two rovers (operating on the opposite sides of the planet) using a command dictionary, driven by human generated intent and scientific and engineering constraints with a framework of constraint-based planning. A human user would provide high-level intent for the design of a control sequence, and to use MPAGEN to do ‘what if’ analysis, projection and plan synthesis.
MAPGEN was a planning engine operated with skilled personnel (Tactical Activity Planner or TAP) from JPL and became the first AI system to control a vehicle on another planet. MAPGEN was in the mission critical uplink chain and was initiated on Sol 14 (14th martian day) in January 2004 when the Spirit rover was commanded to initiate its scientific mission. MAPGEN was built at a cost of $4.25 Million over 3 years and repaid itself within 2 weeks of operation of the mission which lasted for 14 years.
For his and his team's efforts Kanna was awarded NASA’s Exceptional Service Medal.
Publications
J. Bresina and A.K. Jonsson and P.H. Morris and K. Rajan,
Activity Planning for the Mars Exploration Rovers,
J. Bresina and A. Jonsson and P. Morris and K. Rajan,
Mixed-Initiative Planning in MAPGEN: Capabilities and Shortcomings,
M. Ai-Chang and J. Bresina and L. Charest and A. Chase and
J.C. Hsu and A. Jonsson and B. Kanefsky and
P. Morris and K. Rajan and J. Yglesias and
B.G. Chafin and W.C. Dias and P.F. Maldague,
MAPGEN: Mixed Initiative Planning and Scheduling for the
Mars'03 MER Mission,
J. Bresina and A. Jonsson and P. Morris and K. Rajan,
Constraint Maintenance with Preferences and Underlying Flexible Solution,
{kind=link}

{kind=link}
{kind=link}

{kind=link}

{kind=link}

{kind=link}